
 Tiếng Việt
Tiếng Việt English
EnglishGPS Hệ thống định vị toàn cầu trong lĩnh vực công nghiệp tàu thủy

Cấu trúc GPS
Hệ thống định vị toàn cầu (GPS) được cấu thành từ ba phần:
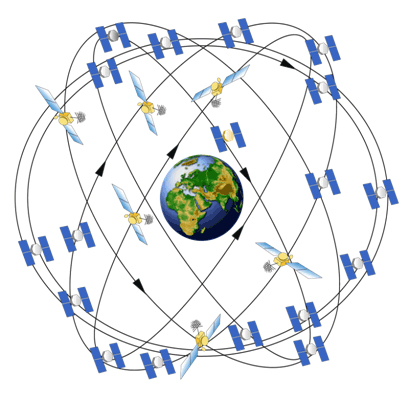
Phần không gian là hệ thống các vệ tinh nhân tạo quay theo quỹ đạo hình elip với chu kỳ 11 giờ 58 phút ở độ cao khoảng 20.000 km có nhiệm vụ nhận các thông tin từ trạm điều khiển trên mặt đất và phát đi các tín hiệu vô tuyến định vị có tần số khoảng 1.5 Ghz. Tín hiệu này chứa các dữ liệu định vị được trạm điều khiển từ mặt đất truyền đến.
Phần điều khiển bao gồm năm (05) trạm giám sát đặt trên mặt đất dùng để quan trắc các vệ tinh, tính toán các thông số quỹ đạo, thông số hiệu chỉnh đồng hồ sau đó phát các thông tin cập nhật và các lệnh điều khiển tới mỗi vệ tinh.


Hệ thống máy thu GPS lắp đặt trên tàu thủy
- Anten thu tín hiệu GPS (anten recever): Thu các tín hiệu (sóng mang dữ liệu) từ vệ tinh GPS mà anten đó có thể thu được (tối thiểu 4 vệ tinh).
- Máy thu GPS (navigator): Thu nhận, phân tích, tính toán và hiển thị kết quả thu được trên màn hình, bao gồm các thông số: toạ độ tàu thuỷ (kinh độ, vĩ độ, độ cao), thời gian, hướng di chuyển, tốc độ di chuyển.
- Bộ đệm đầu ra (Buffer unit): Là thiết bị kết nối giữa máy thu GPS với các thiết bị khác để truyền kết quả mà máy thu tính toán được đến các thiết bị khác trên tàu.
- Dây cáp, các hộp nối dây: để truyền tín hiệu thu được về máy thu GPS.
- Bộ nguồn (Supply unit): Nhận nguồn điện từ nguồn điện trên tàu, sau đó điều chỉnh dòng điện và điện áp phù hợp để cấp nguồn hoạt động cho các thiết bị GPS.
Theo quy phạm các cơ quan đăng kiểm như: VR, NK, DNV, ABS, GL và SOLAS thì tất cả các tàu hoạt động ở vùng biển quốc tế đều phải trang bị ít nhất 01 thiết bị GPS (hoặc tương đương).
Tín hiệu GPS được thu bằng anten đặt trên nóc buồng lái truyền qua đường cáp về máy thu. Tại máy thu, tín hiệu được xử lý, tính toán và hiển thị thông tin trên màn hình. Thiết bị thu tín hiệu GPS được cấp nguồn chính từ hệ thống phát điện trên tàu và một nguồn sự cố từ ắc quy. Khuyến cáo việc lắp đặt anten: ở vị trí cao nhất có thể, không bị che khuất góc nhìn lên vệ tinh quá 15 độ. Ngoài ra, trên các tàu có thể trang bị thêm hệ thống để dự phòng trường hợp hỏng hóc và có chế độ định kỳ bảo dưỡng thiết bị thu GPS.

Hệ thống định vị toàn cầu GPS bị ảnh hưởng nhiều yếu tố bên ngoài dẫn đến sai số và chất lượng của tín hiệu thu không tốt. Để khắc phục điều này, ngày nay người ta đã phát triển hệ thống định vị vi sai (DGPS). DGPS là tiến trình xác định độ sai lệch tọa độ tương đối giữa vị trí của hai máy thu, mỗi máy thu quan trắc đồng thời để đo các trị đo mã và/hoặc pha sóng mang từ các vệ tinh GPS. Thực chất của quá trình là xác định trị số sai biệt khoảng cách giữa các vệ tinh và 2 hoặc nhiều máy thu GPS. Thông thường, một máy thu GPS đã biết trước tọa độ được gọi là trạm tham chiếu và trạm còn lại được gọi là máy thu di động cần xác định vị trí. Cả hai máy thu có thể thu thập dữ liệu đồng thời để tính toán sau hoặc trạm tham chiếu truyền dữ liệu đến máy thu di động trong định vị thời gian thực. Đo cự ly được thực hiện bằng phép so sánh độ sai biệt dùng trị đo mã hoặc pha sóng mang. Nguyên tắc cơ bản giả thiết rằng sai số định vị tuyệt đối tại hai máy thu GPS là gần giống nhau. Sai biệt tọa độ tương đối thường được biểu diễn bằng một vector đường đáy 3-D (baseline vector). Định vị vi sai có thể thực hiện trong cả chế độ động và chế độ tĩnh.
Kỹ thuật định điểm không loại bỏ được các sai số trong hệ thống. DGPS cải thiện đáng kể điều này. Về mặt lý thuyết một số sai số có thể được loại bỏ hoàn toàn. Tuỳ theo từng loại máy thu sử dụng mà kết quả phép đo sẽ đạt đến các độ chính xác khác nhau mà kỹ thuật định vị điểm (định vị tuyệt đối) không thể đạt đến.
Đánh giá GPS
Hệ thống GPS được ứng dụng rộng rãi và được đánh giá cao hơn các thiết bị khác cùng mục đích định vị do chất lượng và độ tin cậy khi hoạt động. Tuy nhiên hệ thống định vị toàn cầu GPS cũng có những hạn chế. Do GPS được điều khiển bởi bộ quốc phòng Mỹ nên vấn đề bí mật về an ninh, quốc phòng của các quốc gia không được đảm bảo. Vì thế mà ứng dụng của GPS vào quân sự không được tự do như ứng dụng vào dân sự.
Trong tương lai con người sẽ tiếp tục chứng kiến sự phát triển của các hệ thống định vị bằng vệ tinh nhân tạo. Trong khi hệ thống GPS luôn được cải tiến, phát triển không ngừng thì các hệ thống định vị khác cũng đang trong quá trình xây dựng, thử nghiệm trên khắp thế giới như ở Nhật Bản, Trung Quốc, Châu Âu...
Ma Ngọc Trinh
Viện KHCN tàu thủy





