
 Tiếng Việt
Tiếng Việt English
EnglishChân vịt bầu xoay
Chân vịt là thiết bị đẩy tàu đi tới bằng cách sử dụng năng lượng được tạo ra và truyền từ máy chính. Sự chuyển động tới của tàu dựa trên nguyên tắc Bernoulli và định luật 3
Những thông số có ảnh hưởng trực tiếp đến lực đẩy gồm: đường kính chân vịt, độ nghiêng của cánh, tỷ số mặt đĩa (tổng diện tích mặt đạp/diện tích hình tròn có đường kính bằng đường kính chân vịt); tốc độ dòng chảy tại vị trí đặt chân vịt, số cánh, số vòng quay, profin cánh chân vịt...

Hiện nay có hai phương án truyền động của chân vịt bầu xoay, tùy theo vị trí của động cơ:
1. Truyền động cơ giới, trong đó động cơ nằm bên trong tàu nối với quả bầu bằng hệ thống bánh răng. Động cơ có thể thuộc loại diesel hay diesel-điện. Tùy theo cách bố trí trục mà chân vịt bầu xoay truyền động cơ giới có thể phân thành hai loại: truyền động chữ L (L-drive) và tryền động chữ Z (Z-drive). Thiết bị đẩy truyền động chữ L có một trục vào thẳng đứng và một trục ra nằm ngang và một hộp bánh răng vuông góc. Còn thiết bị đẩy truyền động chữ Z có một trục vào nằm ngang, một trục thẳng đứng và một trục ra nằm ngang và hai hộp bánh răng vuông góc.
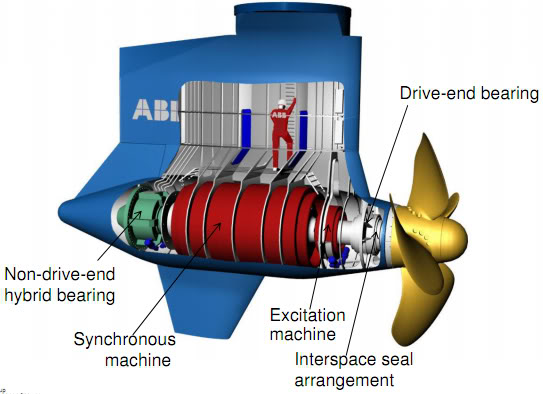
2. Truyền động điện, trong đó một động cơ điện nằm ngay trong quả bầu được nối trực tiếp với chân vịt không cần bánh răng. Điện trên tàu do máy phát diesel hay turbin khí cung cấp.
Chân vịt bầu xoay có tên là ABB Azipod được F.W.Pleuger và F.Busmann (Hãng mang tên Pleuger Unterwasserpumpen GmbH) sáng chế vào năm 1955 và do Tập đoàn ABB sản xuất và là sản phẩm đầu tiên ứng dụng công nghệ này.
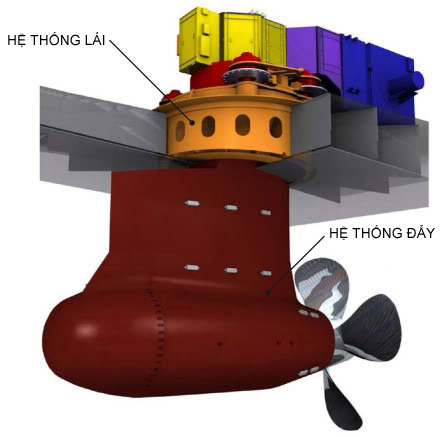
Chân vịt bầu xoay kết hợp với hệ thống lái tạo ra hệ thống đẩy được gọi là hệ thống đẩy Apizod. Trong các hệ thống đẩy truyền thống, động cơ được nối với trục chân vịt và chân vịt phía sau tàu và có một bánh lái đặt sau chân vịt. Nhưng trong hệ thống đẩy Azipod, hệ thống đẩy và hệ thống lái được kết hợp lại thành một. Hệ thống bao gồm một chân vịt được truyền động bởi một động cơ điện, chân vịt này đặt trên bầu có thể xoay 360 độ.
Phân loại chân vịt bầu xoay (loại Azipod của tập đoàn ABB).
Chân vịt bầu xoay có nhiều hãng sản xuất với thương hiệu riêng như:
- ABB với Azipod.
- Rolls-Royce với Alstom Mermaid.
- Schottel với Siemens SSP.
- STN với Wartsila Dolphin.
Quá trình phát triển của chân vịt bầu xoay Azipod có các mốc chính như sau:
- Năm 1987: ý tưởng về Azipod được đưa ra.
- Năm 1994: tàu phá băng đầu tiên được lắp đặt hệ thống này, tàu "Rothelstein".
- Năm 1995: du thuyền đầu tiên được lắp đặt hệ thống này là tàu "Elation".
- Năm 2000: giới thiệu Azipod C.
- Năm 2001: giới thiệu CRP Azipod (Contra-Rotating Propeller).
- Năm 2004: Azipod CZ được lắp đặt trên giàn khoan.
- Năm 2008: giới thiệu Azipod XO.
- Năm 2010: số lượng tàu đặt hàng Azipod lên tới con số 100.
Các dòng chân vịt bầu xoay Azipod của tập đoàn ABB có 3 loại là Azipod V, X và C. Cụ thể là các loại:
- Azipod XO và Azipod VO
- Azipod XC với CRP (contra-rotating propeller - chân vịt quay ngược) – một thành phần trong một bộ chân vịt, là chân vịt lắp đồng trục, nằm phía sau chân vịt chính và có chiều quay ngược lại nhằm triệt tiêu thành phần ngang của lực đẩy chân vịt chính, tạo thêm sức đẩy bổ sung, tiết kiệm nhiên liệu tới 16%:
- Azipod CO
- Azipod CZ
Ưu điểm của hệ thống Azipod:
- Khả năng điều động tốt hơn vì chân vịt có thể xoay mọi hướng. Khoảng cách dừng ngắn hơn nên tránh va tốt hơn chân vịt truyền thống.
- Trong trường hợp tàu có bề ngang rộng, hai hoặc nhiều hơn Azipod có thể hoạt động độc lập, do đó khả năng điều động tốt hơn.
- Tiết kiệm được nhiều khoảng trống trong buồng máy vì hệ thống không có máy, trục hay các phụ tùng khác trong này. Khoảng trống này có thể tận dụng để chứa được nhiều hàng hơn.
- Hệ thống có thể được đặt thấp hơn hệ thống đẩy truyền thống, do đó hiệu năng cao hơn.
- Độ ồn thấp và ít rung hơn hệ thống truyền thống.
- Tiêu thụ ít nhiên liệu và dầu bôi trơn hơn.
- Thân thiện với môi trường hơn vì ít khí thải hơn.
- Dễ dàng vận chuyển và lắp ráp.
Hạn chế của hệ thống Azipod:
- Hệ thống Azipod cần chi phí ban đầu lớn.
- Hạn chế trong công suất tạo bởi động cơ. Hiện nay công suất tối đa có thể tạo là xấp xỉ 25 MW.
Tuy nhiên, Tập đoàn ABB cũng vừa giới thiệu một hệ thống mới của hệ động lực Azipod, trong đó hệ động lực đã tích hợp thành công trên các con tàu phá băng, tàu dịch vụ ngoài khơi và đặc biệt là các du thuyền. Chính hình dạng, trục truyền động z-drive của Azipod đã làm tăng hiệu năng thủy động học, tính năng điều động và dễ dàng lắp đặt.
Gần đây, công ty Công nghiệp nặng Mitsubishi vừa thông báo rằng họ đã đặt hệ động lực Azipod XO công nghệ mới nhất cho đơn hàng 60 triệu USD với ABB trong hệ thống năng lượng và hệ động lực cho hai du thuyền được đóng tại xưởng đóng tàu ở Nagasaki cho một công ty Đức. Mỗi du thuyền 125.000 tấn chở được 3.250 hành khách, dự kiến được bàn giao vào năm 2015 và năm 2016.
T.My





